这个模块化机器人是由宾夕法尼亚大学设计和制造的 名为S
俄罗斯方块对每个人都不陌生。今天推出的模块化机器人具有与俄罗斯方块相同的效果。看起来是这样的:
这种模块化机器人是由宾夕法尼亚大学设计和制造的,被称为SMORES-EP。
SMORES代表自组装模块化机器人,用于极端变形。电永磁体是指模块用来连接的电永磁体。
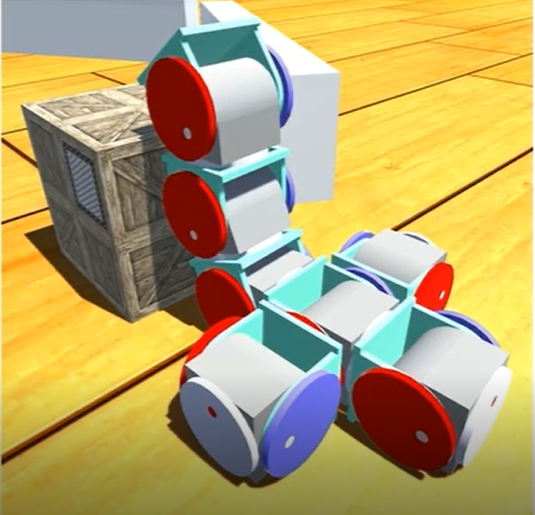
斯莫瑞斯-爱普是一个两边都有轮子的立方体。你可能想知道这个小东西能做什么。
别担心,边肖会先向你解释它的原理。
SMORES-EP模块有四个自由度(平移、倾斜和左右轮)。左右轮都有橡胶轮胎,所以模块可以像汽车一样在平坦的路面上行驶。每个模块都有自己的电池,并与中央计算机通信。迄今为止,已经完成了24个模块。
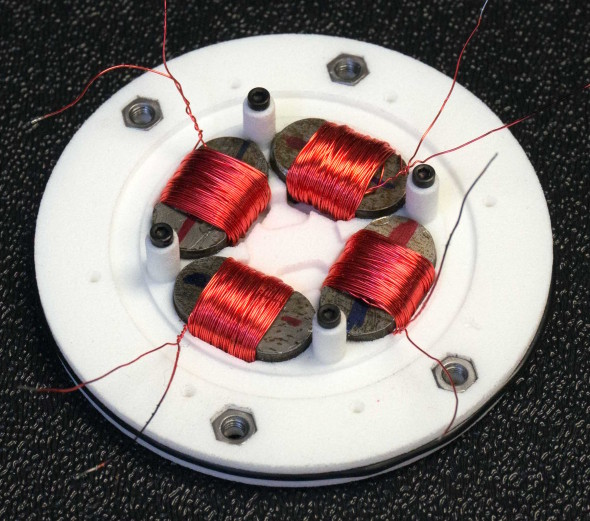
SMORES-EP模块的四个侧面中的每一个都配备有一组电永磁体,其可以与其他模块或金属物体形成牢固的连接。每个极压磁体由一对由永久磁铁芯包裹的电磁线圈组成,可以通过线圈发送电流脉冲进行切换。磁铁接通后,连接的模块保持89牛顿的力而不消耗能量——。它们只在连接和断开时需要能量。SMORES-EP模块通过使用磁体的电感耦合相互通信,基本上是将它们用作短程无线电。
自然界中有一种非常普遍的现象。个体群体可以形成各种结构来克服每个个体的有限能力,特别是对于那些经常需要在大群体中合作来完成任务的昆虫。

这种集体智能对模块化机器人非常重要,模块化机器人由许多简单的组件或模块组成。虽然每个单独的模块通常功能有限,但多个模块可以通过组装成适当的配置来执行复杂的任务。
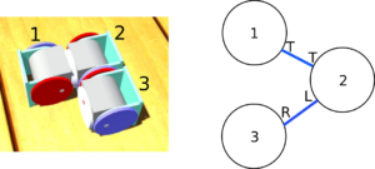
在这项研究中,研究人员提出了一个具有自组装框架的系统。模块化机器人的拓扑结构完全定义为一个图。给定地面上的一组模块和要组装的目标拓扑配置,通过解决任务分配问题,以最佳方式将每个模块分配给目标拓扑配置中的一个角色。然后计算相应的装配操作,这些操作可以并行执行。
自重构模块化机器人通常由多个模块组成,具有统一的对接接口,可以自行转换成不同的配置。重构规划的问题是找出将一组模块转换成另一组模块需要哪些重构序列。
研究者提出了一种新的模块化机器人重构规划算法。该算法有效地将初始配置与目标配置进行比较。重新配置操作可以以分布式方式执行,使得每个模块可以有效地完成其重新配置任务,从而触发系统的全局重新配置。最后,研究人员在一个实际的模块化机器人上演示了该算法,并给出了一些重建任务的例子。
例如,在地面上放置一组SMORES-EP模块,任务是到达盒子的顶部。这些模块必须自组装成一个承载臂才能到达高处。首先,以最优方式计算目标拓扑结构中每个模块的分配,然后计算装配操作顺序。所有映射到具有相同深度的目标运动拓扑的模块可以并行执行,以提高效率。

这种模块化机器人系统可以独立完成高级任务,以满足适应未知环境的需要。
例如,它可以以十字形排列

工字型
为了确保装配操作的成功,SMORES-EP专门配备了一个对接控制器。对接过程分为导航、姿态调整和进近三个步骤。每个相关模块运行一个简单的路径跟踪控制器到达目标位置。然后调整每个模块的姿态,使其与对接接头对齐。最后,所有相关模块被命令接近它们的匹配连接器以完成对接。在某些特殊情况下,需要一个辅助模块来提升相关模块并将其发送到对接位置。
研究人员用实际硬件验证了控制器的性能。

我相信在不久的将来,模块化机器人将会在市场上越来越受欢迎。然而,现阶段模块化机器人自组装的关键技术还有几个挑战值得我们关注:
1.效率,特别是对于模块化机器人系统,它应该涉及更多的模块;
2.对于实际的硬件应用,必须考虑许多物理约束;
3.模块化机器人的精确对接是一个难题。
-

-
无人车“入春”,批量上路仍需“爬坡”
防控疫情的需求激发之下,代替人类送药、送餐送菜、消毒巡逻的无人车成了疫情期间的特殊尖兵。疫情过后,无人车配送是否...
2020-03-23 17:12
-

-
5G、AI、大数据的发展,对智慧城市会有什么影响
市场分调研机构Omdia的最新数据分析显示,全球智能城市人工智能(AI)软件市场将从6 738亿美元(2019年),在2025年将增长到4...
2020-04-07 17:55
-
-
机器人制造过程中的传感器技术之磁光效应传感器
现代电测技术日趋成熟,由于具有精度高、便于微机相连实现自动实时处理等优点,已经广泛应用在电气量和非电气量的测量中。
2020-04-07 17:56
-

-
微软不需要快速拥抱VR
微软经常在游戏领域开辟路径,扮演开拓者的角色,这一点体现在很多方面,包括微软的尖端技术(DX12终极版 DX光追),硬件(X...
2020-04-07 17:57
-

-
波音Starliner载人航天器再次展开测试
去年 12 月,波音为美国宇航局发射了未载人的 Starliner 航天器。然而由于技术问题,任务并没有按计划进行。作为 NASA ...
2020-04-07 17:58