KUKA新的快速启动功能描述 ProfiNet 3.3软件
网络设备设置页面:
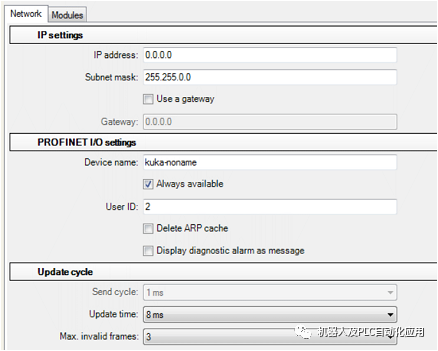
IP地址:输入设备的IP地址。输入设备的IP地址。子网掩码:控制系统出厂时的子网掩码是255.255.0.0,所以输入了这个地址。如果孩子
网络掩码已被修改。输入修改后的地址。应用网关n检查:使用网关。
未选中:不使用网关。网关:输入网关的IP地址。只能在使用网关时输入该地址。设备名称:输入设备的名称。它必须与命名设备时分配的名称相同。始终检查n:当机器人控制器启动时,期望设备被激活。如果设备未激活,将输出故障信息。
未选中:机器人控制系统不检查设备是否在启动时被激活。用户识别号:输入设备的id。标识必须是唯一的,并且不能小于2。
提示:当耦合和去耦设备时,需要识别号。删除地址解析协议缓存检查:删除地址解析协议缓存。未选中:不会删除ARP缓存。
提示:如果设备已经按照示例“减少后所需的时间”进行了配置,请构建
勾选方框。如果按照“正常所需时间”示例进行配置,则不应进行检查。使用诊断警报作为提醒
消息发送n检查:诊断信息显示在KUKA smartHMI消息提示窗口中。
n未选中:在KUKA smartHMI消息提示窗口中不显示诊断信息。刷新时间:输入刷新时间。
刷新时间:每x毫秒在PROFINET控制器和设备之间交换电流
提示:更新时间值越小,CPU利用率越高。
PROFINET的反应时间是PROFINET控制器的更新时间和设备的升级时间。
新时代的总和。在该计算中,不考虑这些数据所需的应用反应时间(例如
例如,提交解释器)。最大无效帧:输入机器人控制系统发出故障信息之前允许丢失的最大数据包数。激活快速启动(FSU):
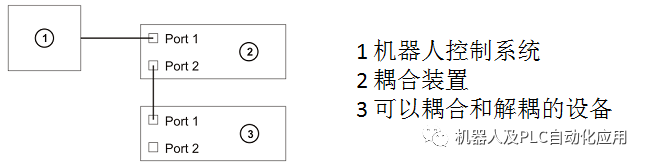
当耦合或启动工业以太网设备时,设备必须尽快达到其工作状态。启动普通设备可能需要10秒钟。通过快速启动,设备在不到一秒钟内处于工作状态。这样,工具可以更快地被替换。
只有当工厂的可耦合和不可耦合设备和设备文档支持快速启动时,才能使用此功能。
最新的VASS06标准机器人在快速换头的网络部分使用“快速启动”功能。
-

-
无人车“入春”,批量上路仍需“爬坡”
防控疫情的需求激发之下,代替人类送药、送餐送菜、消毒巡逻的无人车成了疫情期间的特殊尖兵。疫情过后,无人车配送是否...
2020-03-23 17:12
-

-
5G、AI、大数据的发展,对智慧城市会有什么影响
市场分调研机构Omdia的最新数据分析显示,全球智能城市人工智能(AI)软件市场将从6 738亿美元(2019年),在2025年将增长到4...
2020-04-07 17:55
-
-
机器人制造过程中的传感器技术之磁光效应传感器
现代电测技术日趋成熟,由于具有精度高、便于微机相连实现自动实时处理等优点,已经广泛应用在电气量和非电气量的测量中。
2020-04-07 17:56
-

-
微软不需要快速拥抱VR
微软经常在游戏领域开辟路径,扮演开拓者的角色,这一点体现在很多方面,包括微软的尖端技术(DX12终极版 DX光追),硬件(X...
2020-04-07 17:57
-

-
波音Starliner载人航天器再次展开测试
去年 12 月,波音为美国宇航局发射了未载人的 Starliner 航天器。然而由于技术问题,任务并没有按计划进行。作为 NASA ...
2020-04-07 17:58